State Agency Official State Gazette






Content not available in English
LA COMISIÓN EUROPEA,
Visto el Tratado de Funcionamiento de la Unión Europea,
Vista la Directiva 2002/49/CE del Parlamento Europeo y del Consejo, de 25 de junio de 2002, sobre evaluación y gestión del ruido ambiental (1), y en particular su artículo 12,
Considerando lo siguiente:
(1) El anexo II de la Directiva 2002/49/CE establece métodos de evaluación comunes para los Estados miembros que deben utilizarse para la información sobre el ruido ambiental y sus efectos para la salud, en particular para la elaboración de mapas de ruido, y para adoptar planes de acción basados en los resultados de dichos mapas de ruido. Este anexo debe adaptarse al progreso técnico y científico.
(2) Entre 2016 y 2020, la Comisión cooperó con expertos técnicos y científicos de los Estados miembros con el objetivo de evaluar qué adaptaciones se necesitaban, habida cuenta del progreso técnico y científico logrado en lo que respecta al cálculo del ruido ambiental. Este proceso se llevó a cabo en estrecha consulta con el Grupo de expertos sobre el ruido, integrado por Estados miembros, el Parlamento Europeo, partes interesadas del sector, autoridades públicas de los Estados miembros, ONG, ciudadanos y académicos.
(3) En el anexo de la presente Directiva Delegada se establecen las adaptaciones que deben efectuarse en los métodos comunes de evaluación y que consisten en aclarar las fórmulas destinadas a calcular la propagación del ruido, adaptar los cuadros a los conocimientos más recientes y mejorar la descripción de los pasos de los cálculos. Esto atañe al cálculo del ruido del tráfico rodado, el ruido del tráfico ferroviario, el ruido industrial y el ruido del tráfico aéreo. Los Estados miembros deben emplear estos métodos, a más tardar, a partir del 31 de diciembre de 2021.
(4) Procede, por tanto, modificar el anexo II de la Directiva 2002/49/CE en consecuencia.
(5) Las medidas previstas en la presente Directiva se ajustan al dictamen del Grupo de expertos sobre el ruido, al que se consultó el 12 de octubre de 2020.
HA ADOPTADO LA PRESENTE DIRECTIVA:
El anexo II de la Directiva 2002/49/CE se modifica de conformidad con lo dispuesto en el anexo de la presente Directiva.
1. Los Estados miembros pondrán en vigor las disposiciones legales, reglamentarias y administrativas necesarias para dar cumplimiento a lo establecido en la presente Directiva a más tardar el 31 de diciembre de 2021. Comunicarán inmediatamente a la Comisión el texto de dichas disposiciones.
Cuando los Estados miembros adopten dichas disposiciones, estas harán referencia a la presente Directiva o irán acompañadas de dicha referencia en su publicación oficial. Los Estados miembros establecerán las modalidades de la mencionada referencia.
2. Los Estados miembros comunicarán a la Comisión el texto de las principales disposiciones de Derecho interno que adopten en el ámbito regulado por la presente Directiva.
La presente Directiva entrará en vigor el día siguiente al de su publicación en el Diario Oficial de la Unión Europea.
Los destinatarios de la presente Directiva serán los Estados miembros.
Hecho en Bruselas, el 21 de diciembre de 2020.
Por la Comisión
La Presidenta
Ursula VON DER LEYEN
(1) DO L 189 de 18.7.2002, p. 12.
El anexo II se modifica como sigue:
1) En la sección 2.1.1, el segundo párrafo se sustituye por el texto siguiente:
«Los cálculos se realizan por bandas de octava para el ruido del tráfico vial, del tráfico ferroviario e industrial, salvo para la potencia acústica de la fuente de ruido ferroviario, que usa bandas de tercio de octava. En el caso del ruido del tráfico vial, del tráfico ferroviario e industrial, conforme a estos resultados de banda de octava, el nivel sonoro medio a largo plazo con ponderación A para el día, la tarde y la noche, tal y como se establece en el anexo I y en el artículo 5 de la Directiva 2002/49/CE, se calcula mediante el método descrito en las secciones 2.1.2, 2.2, 2.3, 2.4 y 2.5. En el caso del tráfico vial y ferroviario en aglomeraciones, el nivel sonoro medio a largo plazo con ponderación A se determina sumando la aportación de los segmentos vial y ferroviario, incluido el ruido de los grandes ejes viarios y ferroviarios».
2) La sección 2.2.1 se modifica como sigue:
|
|
|
|
3) |
El cuadro 2.3.b se modifica como sigue:
|
|
4) |
La sección 2.3.2 se modifica como sigue:
|
|
5) |
en la sección 2.3.3, el apartado «Corrección de la radiación estructural (puentes y viaductos)» se sustituye por el texto siguiente: «Corrección de la radiación estructural (puentes y viaductos) En caso de que el tramo de vía se encuentre en un puente, es necesario tener en cuenta el ruido adicional generado por la vibración del puente como resultado de la excitación ocasionada por la presencia del tren. El ruido del puente se modeliza como una fuente adicional en la que la potencia acústica por vehículo se obtiene mediante:
donde LH, bridge,i es la función de transferencia del puente. El ruido del puente LW,0, bridge,i únicamente representa el sonido irradiado por la construcción del puente. El ruido rodante de un vehículo sobre el puente se calcula mediante las fórmulas (2.3.8) a (2.3.10), seleccionando la función de transferencia de la vía correspondiente al sistema de vías del puente. Normalmente no se tienen en cuenta las barreras colocadas en los bordes del puente». |
|
6) |
La sección 2.4.1 se modifica como sigue:
|
|
7) |
En la sección 2.5.1, el párrafo séptimo se sustituye por el texto siguiente: «Los objetos con una inclinación superior a 15o en relación con la vertical no se consideran reflectores, pero se tienen en cuenta en todos los demás aspectos de la propagación, como los efectos suelo y la difracción». |
|
8) |
La sección 2.5.5 se modifica como sigue:
|
|
9) |
La sección 2.5.6 se modifica como sigue:
|
|
10) |
La sección 2.7.5, «Rendimiento y ruido de las aeronaves», se sustituye por el texto siguiente: «2.7.5 Rendimiento y ruido de las aeronaves La base de datos de ANP que figura en el apéndice I contiene los coeficientes de rendimiento de las aeronaves y los motores, los perfiles de despegue y aproximación, y las relaciones NPD de una parte considerable de las aeronaves civiles que operan desde aeropuertos de la Unión Europea. Si se trata de tipos o variantes de aeronaves cuyos datos no se facilitan actualmente, pueden representarse mejor mediante los datos de otras aeronaves que suelen ser similares. Estos datos se obtuvieron para calcular los contornos de ruido de una flota promedio o representativa y del tráfico global en un aeropuerto. Puede que no sean apropiados para predecir los niveles de ruido absolutos de un modelo de aeronave concreto y no sean adecuados para comparar el rendimiento en cuanto al ruido y las características de tipos o modelos de aeronaves concretos o de una flota específica de aeronaves. En su lugar, para determinar qué tipos o modelos de aeronaves o qué flotas concretas de aeronaves generan más ruido, deben consultarse los certificados de niveles de ruido. La base de datos de ANP incluye, para cada uno de los tipos de aeronave que figuran en ella, uno o varios perfiles predeterminados de despegue y aterrizaje. Es preciso estudiar la aplicabilidad de estos perfiles al aeropuerto objeto de examen y determinar los perfiles de puntos fijos o las etapas del procedimiento que mejor representan los vuelos en dicho aeropuerto». |
|
11) |
En la sección 2.7.11, el título del segundo apartado, «Dispersión de la trayectoria», se sustituye por el título siguiente: «Dispersión lateral de la trayectoria». |
|
12) |
En la sección 2.7.12, después del párrafo sexto y antes del séptimo y último párrafo, se añade el siguiente párrafo: «Las fuentes de ruido asociadas a aeronaves deben introducirse a una altura mínima de 1,0 m (3,3 ft) por encima del nivel del aeródromo o por encima de los niveles de elevación del terreno de la pista, según proceda». |
|
13) |
La sección 2.7.13, «Construcción de segmentos de trayectorias de vuelo», se sustituye por el texto siguiente: «2.7.13 Construcción de segmentos de trayectorias de vuelo Cada trayectoria de vuelo tiene que definirse mediante un conjunto de coordenadas de segmentos (nodos) y parámetros de vuelo. El origen se tiene en cuenta para determinar las coordenadas de los segmentos de la trayectoria en tierra. A continuación, se calcula el perfil del vuelo, recordando que, para un conjunto de pasos procedimentales determinado, el perfil depende de la trayectoria en tierra; por ejemplo, con el mismo empuje y a la misma velocidad, la velocidad de ascenso de la aeronave es inferior, a su vez, que en vuelo en línea recta. A continuación, se realiza la subsegmentación para la aeronave en pista (desplazamiento en tierra firme en el aterrizaje o el despegue) y con la aeronave cerca de la pista (ascenso inicial o aproximación final). Después deben subsegmentarse los segmentos en vuelo con unas velocidades considerablemente distintas en los puntos inicial y final. Posteriormente, se determinan las coordenadas bidimensionales de los segmentos de la trayectoria en tierra (*) y se combinan con el perfil del vuelo bidimensional con el objetivo de crear los segmentos de la trayectoria del vuelo tridimensional. Por último, se eliminan los puntos de la trayectoria del vuelo que estén demasiado próximos entre sí. Perfil del vuelo Los parámetros que describen cada segmento del perfil del vuelo al inicio (sufijo 1) y al final (sufijo 2) del segmento son:
Para crear un perfil de vuelo a partir de un conjunto de etapas del procedimiento (síntesis de la ruta del vuelo), los segmentos se crean en secuencias para conseguir las condiciones necesarias en los puntos finales. Los parámetros de los puntos finales para cada segmento se convierten en los parámetros de los puntos iniciales para cada segmento siguiente. En el cálculo de cualquier segmento, los parámetros se saben al inicio; las condiciones necesarias al final se especifican mediante el paso del procedimiento. Los pasos se definen mediante la información predeterminada de ANP, o bien los define el usuario (por ejemplo, a partir de los manuales de vuelo). Las condiciones finales suelen ser la altura y la velocidad; la tarea de creación de perfiles consiste en determinar la distancia de la trayectoria cubierta para alcanzar dichas condiciones. Los parámetros no definidos se determinan mediante los cálculos de rendimiento del vuelo descritos en el apéndice B. Si la trayectoria en tierra es recta, los puntos del perfil y los parámetros del vuelo asociados pueden determinarse con independencia de la trayectoria en tierra (el ángulo de alabeo siempre es cero). No obstante, es raro que las trayectorias en tierra sean rectas; suelen incorporar virajes y, para conseguir los mejores resultados, tienen que contabilizarse al determinar el perfil de vuelo bidimensional, cuando proceda, dividiendo los segmentos del perfil en los nodos de la trayectoria en tierra para introducir cambios del ángulo de alabeo. Por norma general, la longitud del siguiente segmento se desconoce desde el principio y se calcula suponiendo provisionalmente que no se produce ningún cambio en el ángulo de alabeo. Si se observa que el segmento provisional abarca uno o varios nodos de la trayectoria en tierra, el primero en s, es decir, s1 < s < s2 , el segmento se trunca en s, calculando ahí los parámetros mediante interpolación (véase a continuación). Estos se convierten en los parámetros de los puntos finales del segmento actual y en los parámetros de los puntos iniciales de un nuevo segmento —que conservan las mismas condiciones finales objetivo—. Si no hay ningún nodo de la trayectoria en tierra que intervenga, se confirma el segmento provisional. Si se ignoran los efectos de los virajes en el perfil de vuelo, se adopta la solución de un único segmento en vuelo recto, aunque se conserva la información del ángulo de alabeo para un uso posterior. Independientemente de que los efectos del viraje se modelicen completamente o no, cada trayectoria de vuelo tridimensional se genera mediante la combinación de su perfil de vuelo bidimensional con su trayectoria en tierra bidimensional. El resultado es una secuencia de conjuntos de coordenadas (x,y,z), y cada una ellas es un nodo de la trayectoria en tierra segmentada, un nodo del perfil de vuelo o ambos, y los puntos del perfil van acompañados de los valores correspondientes de altura z, velocidad respecto al suelo V, ángulo de alabeo ε y potencia del motor P. Para un punto de la vía (x,y) que se encuentra entre los puntos finales de un segmento del perfil del vuelo, los parámetros del vuelo se interpolan como sigue:
donde
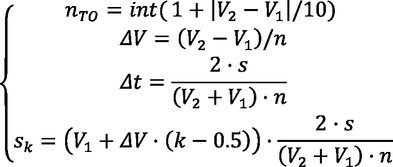
Téngase en cuenta que, mientras que se supone que z y ε varían linealmente con la distancia, se supone que V y P varían linealmente con el tiempo (es decir, la aceleración constante (**)). Al asociar los segmentos del perfil del vuelo con los datos de radar (análisis de la trayectoria del vuelo), todas las distancias de los puntos finales, las alturas, las velocidades y los ángulos de alabeo se determinan directamente a partir de dichos datos; solo el reglaje de la potencia tiene que calcularse conforme a las ecuaciones de rendimiento. Habida cuenta de que las coordenadas del perfil de vuelo y de la trayectoria en tierra se pueden asociar según corresponda, suele tratarse de una tarea bastante sencilla. Desplazamiento en tierra firme al despegar Al despegar, a medida que la aeronave acelera entre el punto en que se libera el freno (lo que también se conoce como punto de partida de rodaje, SOR) y el punto de despegue, la velocidad cambia radicalmente a una distancia comprendida entre 1 500 y 2 500 m, desde cero hasta un rango comprendido entre 80 y 100 m/s. El empuje al despegar se divide en segmentos con longitudes variables y, con respecto a cada una de ellas, la velocidad de la aeronave cambia en incrementos específicos ΔV de no más de 10 m/s (en torno a 20 kt). Aunque realmente varía durante el rodaje al despegar, una hipótesis de aceleración constante es adecuada para este propósito. En este caso, para la fase de despegue, V1 es la velocidad inicial, V2 es la velocidad de despegue, nTO es el número de segmentos de despegue y sTO es la distancia de despegue equivalente. Para la distancia de despegue equivalente sTO (véase el apéndice B), la velocidad inicial V1 y la velocidad de despegue V2 , el número nTO de segmentos para el desplazamiento en tierra firme es:
y, en consecuencia, el cambio de velocidad a lo largo del segmento es:
y el tiempo Δt en cada segmento (con una supuesta aceleración constante) es:
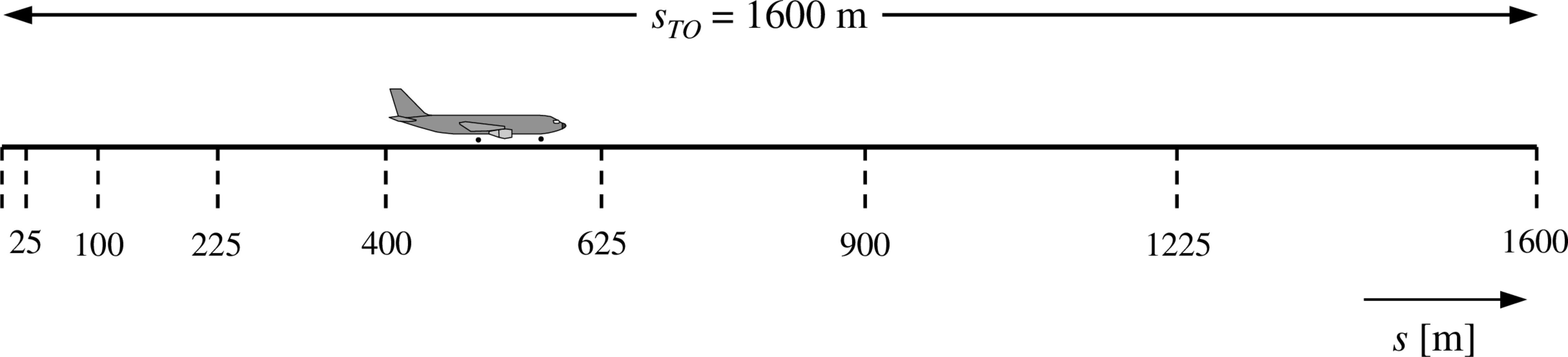
La longitud sTO,k del segmento k (1 ≤ k ≤ nTO) del rodaje al despegar es:
Ejemplo: Para una distancia de despegue sTO = 1 600 m, V1=0m/s y V2 = 75 m/s, esto resulta en nTO = 8 segmentos con longitudes que oscilan entre los 25 y los 375 metros (véase la figura 2.7.g):
Al igual que sucede con los cambios de velocidad, el empuje de la aeronave cambia a lo largo de cada segmento mediante un incremento constante ΔP, que se calcula como:
donde PTO y Pinit, respectivamente, designan el empuje de la aeronave en el punto de despegue y el empuje de la aeronave al punto de partida de rodaje de despegue. El uso de este incremento constante del empuje (en lugar del uso de la ecuación de forma cuadrática 2.7.6) pretende ser coherente con la relación lineal entre el empuje y la velocidad en el caso de una aeronave con motor a reacción. Nota importante: Las ecuaciones y el ejemplo anteriores asumen implícitamente que la velocidad inicial de la aeronave al principio de la fase de despegue es cero. Esto se corresponde a la situación habitual, cuando aeronave empieza a rodar y a acelerar desde el punto en que se libera el freno. Sin embargo, también hay situaciones en que la aeronave puede empezar a acelerar desde su velocidad de rodaje, sin detenerse en el umbral de pista. Cuando la velocidad inicial Vinit no sea cero, deben usarse las siguientes ecuaciones «generales», en lugar de las ecuaciones 2.7.8, 2.7.9, 2.7.10 y 2.7.11.
En ese caso, en la fase de despegue, V1 es la velocidad inicial Vinit , V2 es la velocidad de despegue VTO , n es el número de segmentos de despegue nTO, s es la distancia de despegue equivalente sTO , y sk es la longitud sTO,k del segmento k (1 [Símbolo] k [Símbolo] n). Empuje en tierra al aterrizar Aunque el empuje en tierra para el aterrizaje es básicamente una inversión del empuje en tierra para el despegue, es necesario tener especialmente en cuenta:
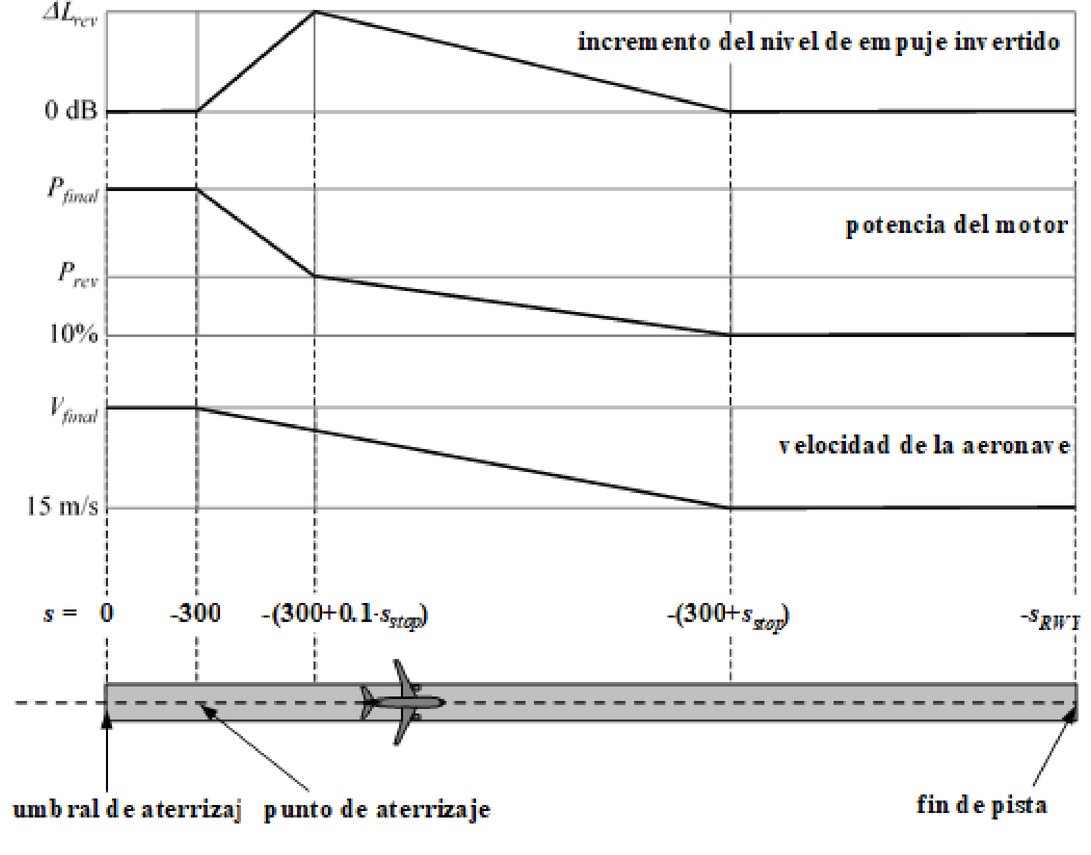
En comparación con la distancia de rodaje de despegue, que se deriva de los parámetros del rendimiento de la aeronave, la distancia de parada sstop (es decir, la distancia desde el aterrizaje hasta el punto en que la aeronave sale de la pista) no es puramente específica de la aeronave. Aunque se puede calcular una distancia de parada mínima a partir del rendimiento y la masa de la aeronave (y el empuje inverso disponible), la distancia de parada real depende también de la ubicación de las pistas de rodaje, de la situación del tráfico y de los reglamentos específicos del aeropuerto que rigen el uso del empuje inverso. El uso del empuje inverso no es un procedimiento estándar; solo se aplica si no se puede conseguir la desaceleración necesaria mediante la utilización de los frenos de las ruedas. (El empuje inverso puede resultar realmente perturbador, ya que un cambio rápido de la potencia del motor del ralentí al ajuste inverso produce un estruendo repentino). No obstante, la mayoría de las pistas se usan para los despegues y los aterrizajes, para que el empuje inverso tenga un efecto mínimo en los contornos de ruido, habida cuenta de que la energía acústica total en las proximidades de la pista está dominada por el ruido producido por las operaciones de despegue. Las contribuciones del empuje inverso a los contornos solo pueden resultar significativas cuando el uso de la pista está limitado a las operaciones de aterrizaje. Físicamente, el ruido del empuje inverso es un proceso muy complejo, pero, al tener una importancia relativamente baja para los contornos de ruido del aire, se puede modelizar de manera sencilla —el cambio rápido de la potencia del motor se tiene en cuenta mediante la segmentación adecuada—. Es evidente que la modelización del empuje en tierra al aterrizar es menos complicada que para el ruido del empuje al despegar. Se recomiendan los siguientes supuestos de modelización simplificada para uso general, siempre que no haya información detallada disponible (véase la figura 2.7.h.1).
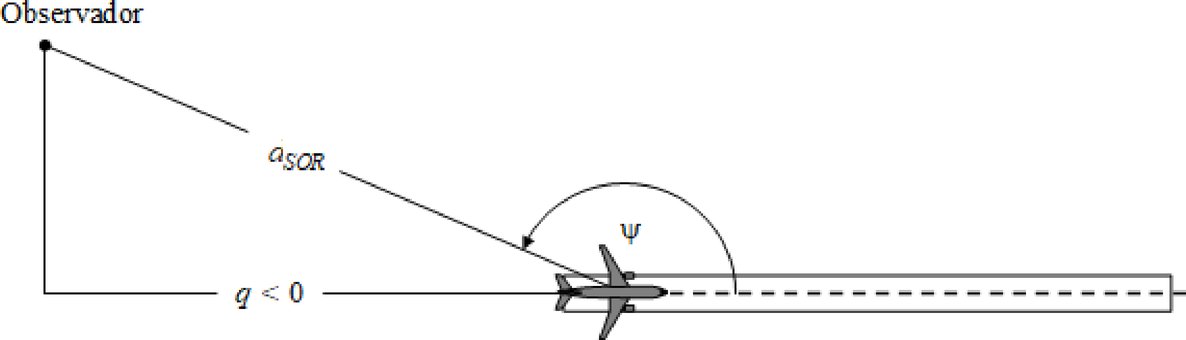
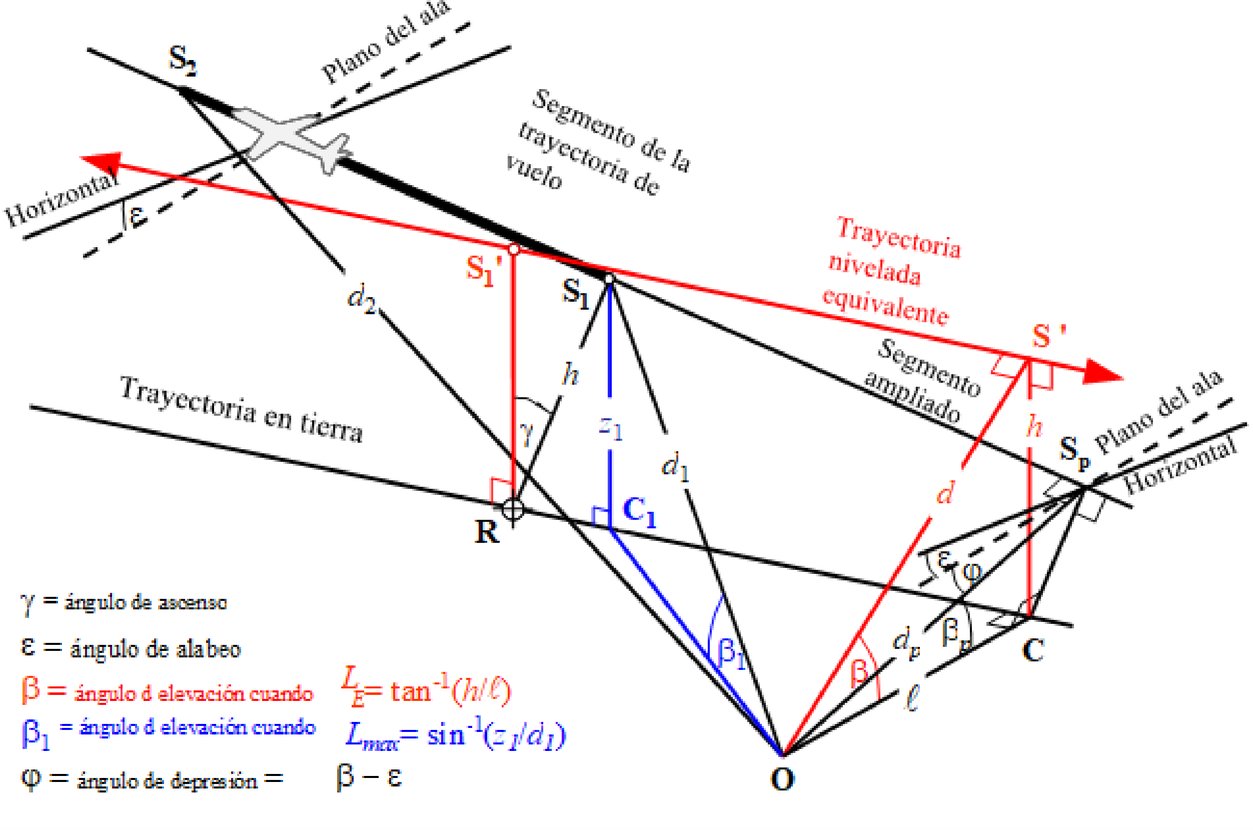
La aeronave cruza el umbral de aterrizaje (que tiene la coordenada s = 0 a lo largo de la trayectoria de aproximación en tierra) a una altitud de 50 pies y, a continuación, prosigue el descenso en su pendiente de planeo hasta que entra en contacto con la pista. Con una pendiente de planeo de 3o, el punto de toma de contacto está 291 m por encima del umbral de aterrizaje (como muestra la figura 2.7.h.1). A continuación, la aeronave se desacelera a lo largo de la distancia de parada sstop —cuyos valores específicos de la aeronave se facilitan en la base de datos de ANP— a partir de la velocidad de aproximación final Vfinal hasta 15 m/s. Habida cuenta de los rápidos cambios de velocidad a lo largo de este segmento, debe subsegmentarse de la misma forma que para el desplazamiento en tierra firme al despegar (segmentos en vuelo con cambios rápidos de velocidad), usando las ecuaciones generales 2.7.13 (puesto que la velocidad de rodaje no es igual a cero). La potencia del motor cambia de una potencia de aproximación final al aterrizar a un reglaje de potencia de empuje inverso Prev a lo largo de una distancia de 0,1•sstop , luego disminuye al 10 % de la potencia máxima disponible sobre el 90 % de la distancia de parada restante. Hasta el final de la pista (a s = -sRWY), la velocidad de la aeronave permanece constante. Las curvas NPD para el empuje inverso actualmente no están incluidas en la base de datos de ANP y, por tanto, es necesario confiar en las curvas convencionales para modelizar este efecto. Normalmente, la potencia de empuje inverso Prev ronda el 20 % del reglaje de potencia total, y esto se recomienda cuando no hay disponible información operativa. No obstante, con un reglaje de potencia determinado, el empuje inverso tiende a generar mucho más ruido que el empuje de propulsión, y es necesario aplicar un incremento ΔL al nivel del evento derivado de NPD, aumentando desde cero hasta un valor ΔLre (5 dB se recomienda provisionalmente (***)) a lo largo de 0,1•sstop y, a continuación, disminuye linealmente hasta cero durante el resto de la distancia de parada. Segmentación del ascenso inicial y segmentos de la aproximación final La geometría del segmento respecto del receptor cambia con rapidez durante los segmentos en vuelo del ascenso inicial y la aproximación final, en particular en lo que respecta a las ubicaciones del observador en el lateral de la trayectoria de vuelo, donde el ángulo de elevación (ángulo beta) también cambia con rapidez cuando la aeronave asciende o desciende en estos segmentos iniciales/finales. Las comparaciones con cálculos de segmentos muy pequeños revelan que usar un único segmento de ascenso o de aproximación por debajo de cierta altura (en relación con la pista), o un número limitado de ellos, resulta en una ligera aproximación del ruido al lado de la trayectoria del vuelo para métricas integradas. Esto se debe a la aplicación de un único ajuste de la atenuación lateral a cada segmento, correspondiente a un único valor del ángulo de elevación específico del segmento, mientras que el rápido cambio de este parámetro da lugar a importantes variaciones del efecto de atenuación lateral a lo largo de cada segmento. La precisión del cálculo se mejora mediante la subsegmentación de los segmentos en vuelo de ascenso inicial y aproximación final. El número de subsegmentos y la longitud de cada uno de ellos determinan la “granularidad” del cambio en la atenuación lateral que se contabilizará. Teniendo en cuenta la expresión de la atenuación lateral total de la aeronave con motores montados en fuselaje, se puede observar que, para un cambio limitado de la atenuación lateral de 1,5 dB por subsegmento, los segmentos en vuelo de ascenso y aproximación ubicados a una altura inferior a 1 289,6 m (4 231 ft) por encima de la pista deben subsegmentarse en función del siguiente conjunto de valores de altura:
Para cada segmento original que se encuentre por debajo de 1 289,6 m (4 231 ft), las alturas antes indicadas se aplican identificando cuál es la más cercana a la altura del punto final original (en los segmentos de ascenso) o del punto de inicio original (en los segmentos de aproximación). Las alturas reales del subsegmento (zi) se calcularían de la siguiente forma:
donde:
Ejemplo de un segmento de ascenso inicial: Si la altura del punto final del segmento original está en ze = 304,8 m entonces, a partir del conjunto de valores de altura, 214,9 m < ze < 334,9 m y la altura del conjunto más cercana a ze es z’7 = 334,9 m. A continuación, las alturas de los puntos finales del subsegmento se calculan como sigue:
(obsérvese que en este caso k =1, ya que es el segmento de ascenso inicial) Por tanto, z1 sería 17,2 m y z2 sería 37,8 m, etc. Segmentación de los segmentos en vuelo Para los segmentos en vuelo en los que hay un cambio de velocidad importante a lo largo de un segmento, debe subdividirse en cuanto al desplazamiento en tierra firme, es decir
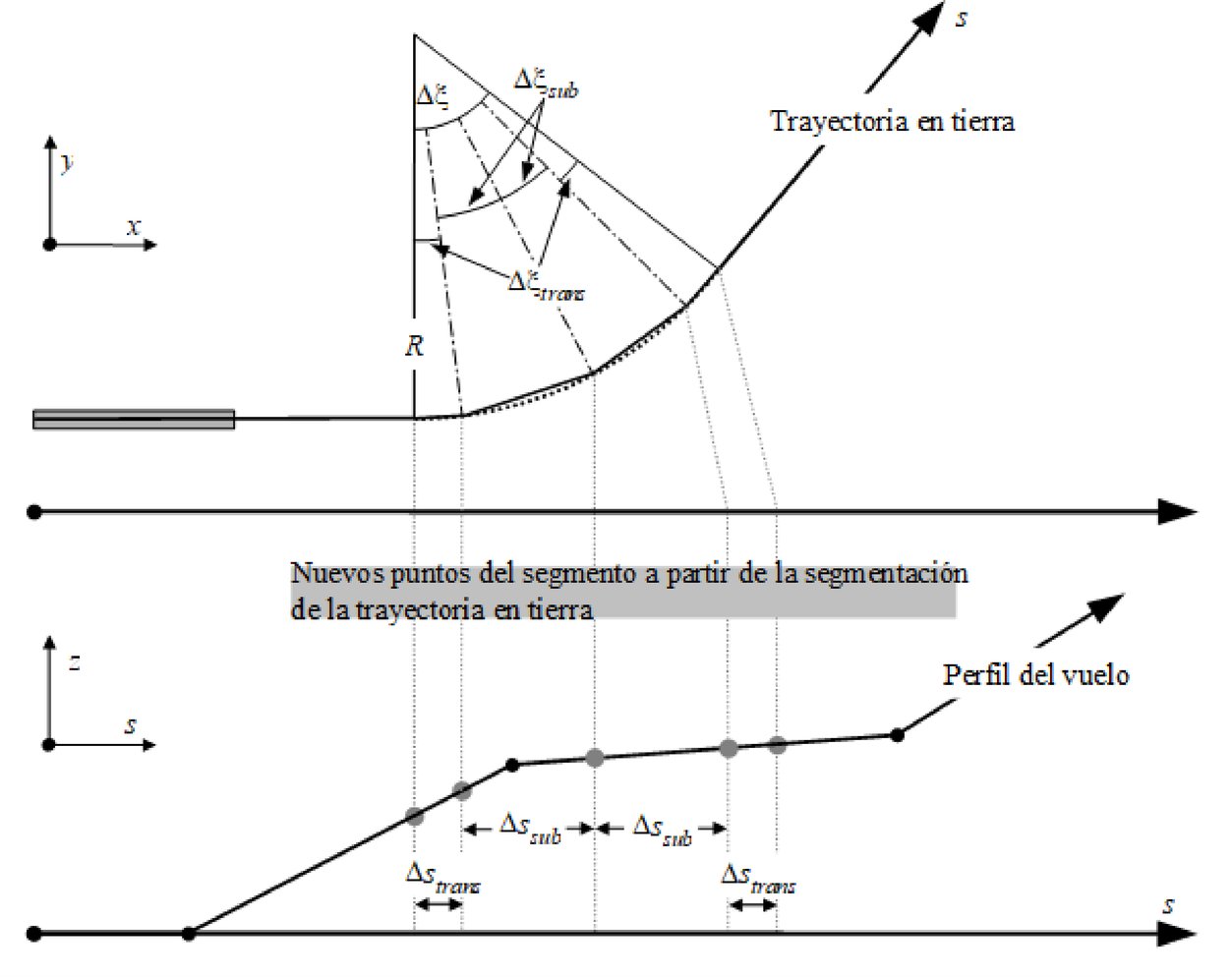
donde V1 y V2 son las velocidades inicial y final del segmento, respectivamente. Los parámetros del subsegmento correspondiente se calculan de manera similar en cuanto al desplazamiento en tierra firme al despegar, usando las ecuaciones 2.7.9 a 2.7.11. Trayectoria en tierra Una trayectoria en tierra, ya sea una trayectoria principal o una subtrayectoria dispersa, se define mediante una serie de coordenadas (x,y) en el plano de masa (por ejemplo, a partir de la información de radar) o mediante una secuencia de comandos vectoriales que describen los segmentos rectos y los arcos circulares (virajes de radio definido r y cambio de rumbo Δξ). Para la modelización de la segmentación, un arco se representa mediante una secuencia de segmentos rectos colocados en los subarcos. Aunque no aparecen explícitamente en los segmentos de la trayectoria en tierra, el alabeo de la aeronave durante los virajes influye en su definición. En el apéndice B4 se explica cómo calcular los ángulos de alabeo durante un viraje uniforme pero, evidentemente, no se aplican realmente ni se eliminan al instante. No se explica cómo gestionar las transiciones entre los vuelos rectos y en viraje, o bien entre un viraje y uno inmediatamente secuencial. Por norma general, es probable que los detalles, que competen al usuario (véase la sección 2.7.11), tengan un efecto insignificante en los contornos finales; el requisito consiste principalmente en evitar las discontinuidades en los extremos del viraje, y esto puede conseguirse simplemente, por ejemplo, insertando segmentos de transición cortos sobre los cuales el ángulo de alabeo cambia linealmente con la distancia. Solo en el caso especial de que un viraje particular pueda tener un efecto dominante en los contornos finales, sería necesario modelizar las dinámicas de la transición de forma más realista, a fin de relacionar el ángulo de alabeo con tipos de aeronaves particulares y adoptar velocidades de desplazamiento apropiadas. En este caso basta con indicar que los subarcos finales Δξtrans en cualquier viraje dependen de los requisitos de cambio del ángulo de alabeo. El resto del arco con cambio de rumbo de Δξ - 2·Δξtrans grados se divide en nsub subarcos según la ecuación:
donde int(x) es una función que devuelve la parte entera de x. Entonces, el cambio de rumbo Δξsub de cada subarco se calcula como
donde nsub debe ser lo suficientemente grande como para garantizar que Δξsub ≤ 10 grados. La segmentación de un arco (excluidos los subsegmentos de transición de terminación) se ilustra en la figura 2.7.h.2 (****).
Una vez que se han definido los segmentos de la trayectoria en tierra en el plano x-y, los segmentos del perfil de vuelo (en el plano s-z) se superponen para obtener los segmentos de la trayectoria tridimensional (x, y, z). La trayectoria en tierra siempre debe cubrir desde la pista hasta más allá de la cuadrícula de cálculo. Esto puede conseguirse, en caso necesario, incorporando un segmento recto de la longitud adecuada al último segmento de la trayectoria en tierra. La longitud total del perfil del vuelo, una vez combinada con la trayectoria en tierra, también debe cubrir desde la pista hasta más allá de la cuadrícula de cálculo. Esto puede conseguirse, en caso necesario, añadiendo un punto de perfil adicional:
Ajustes de segmentación de los segmentos en vuelo Después de derivar los segmentos de la trayectoria tridimensional del vuelo conforme al procedimiento descrito en la sección 2.7.13, puede resultar necesario realizar ajustes adicionales en la segmentación para eliminar los puntos de la trayectoria del vuelo que estén demasiado próximos entre sí. Cuando los puntos adyacentes se encuentran a 10 metros de distancia entre sí, y si las velocidades y los empujes asociados son los mismos, es necesario eliminar uno de los puntos. (*) Para este fin, la longitud total de la trayectoria en tierra siempre debe exceder la del perfil del vuelo. Esto puede conseguirse, si resulta necesario, con la incorporación de segmentos rectos de una longitud adecuada al último segmento de la trayectoria en tierra." (**) Incluso aunque el reglaje de la potencia del motor se mantenga constante a lo largo de un segmento, la fuerza propulsora y la aceleración pueden cambiar debido a la variación de la densidad del aire con la altura. No obstante, a efectos de la modelización del ruido, estos cambios suelen ser insignificantes." (***) Esto se recomendó en la edición anterior de CEAC, Doc 29, pero aún se considera provisional a la espera de que se obtengan más datos experimentales corroborativos." (****) Definida de esta forma sencilla, la longitud total de la trayectoria segmentada es ligeramente inferior a la de la trayectoria circular. No obstante, el error de contorno consecuente es insignificante si los incrementos angulares son inferiores a 30o.»." |
|
14) |
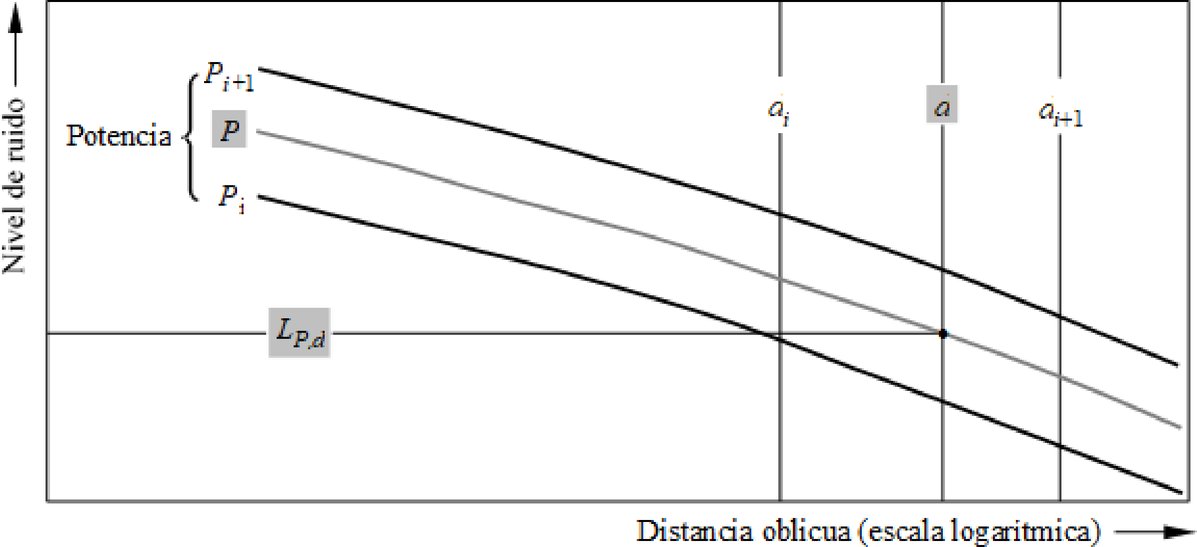
La sección 2.7.16, «Determinación de los niveles del evento a partir de los datos NPD», se sustituye por el texto siguiente: «2.7.16 Determinación de los niveles del evento a partir de los datos NPD La fuente principal de datos sobre el ruido de las aeronaves es la base de datos internacional de rendimiento y ruido de las aeronaves (ANP). Esta tabula Lmax y LE en función de la distancia de propagación d - para tipos de aeronaves específicos, variantes, configuraciones del vuelo (aproximación, salida, flaps) y reglaje de potencia P. Dichos datos se refieren a un vuelo uniforme a velocidades de referencia específicas Vref a lo largo de una trayectoria de vuelo recta supuestamente infinita (*). Más adelante se describe la forma en que se especifican las variables independientes P y d. En una única búsqueda, con los valores de entrada P y d, los valores de salida necesarios son los niveles básicosLmax(P,d) o LE ∞(P,d) (aplicables a una trayectoria de vuelo infinita). A menos que los valores se tabulen exactamente para P o d, por norma general resultará necesario calcular los niveles necesarios de ruido del evento mediante la interpolación. Se usa una interpolación lineal entre el reglaje de potencia tabulada, mientras que se utiliza una interpolación logarítmica entre las distancias tabuladas (véase la figura 2.7.i).
Si Pi y Pi+ 1 son valores de potencia del motor para los que se tabula el nivel de ruido con respecto a los datos de distancia, el nivel de ruido L(P) a una distancia determinada para la potencia intermedia P, entre Pi y Pi+ 1, resulta de:
Si, con cualquier reglaje de potencia, di y di+ 1 son distancias para las cuales se tabulan los datos de ruido, el nivel de ruido L(d) para una distancia intermedia d, entre di y di+ 1, resulta de:
Con las ecuaciones (2.7.19) y (2.7.20), se puede obtener un nivel de ruido L(P,d) para cualquier reglaje de potencia P y a cualquier distancia d contemplada en la base de datos NPD. Para distancias d que queden fuera del marco de NPD, se usa la ecuación 2.7.20 para realizar la extrapolación de los últimos dos valores, es decir, llegadas desde L(d1) y L(d2) o salidas desde L(dI-1) y L(dI), donde I es el número total de puntos NPD en la curva. Por tanto, Llegadas:
Salidas:
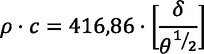
Habida cuenta de que, a cortas distancias d, los niveles de ruido aumentan con mucha rapidez a medida que disminuye la distancia de propagación, se recomienda imponer un límite inferior de 30 m con respecto a d, es decir, d = max(d, 30 m). Ajuste de impedancia de datos NPD estándar Los datos NPD facilitados en la base de datos de ANP se normalizan para condiciones atmosféricas específicas (temperatura de 25 °C y presión de 101,325 kPa). Antes de aplicar el método de interpolación/extrapolación descrito anteriormente, debe aplicarse un ajuste de impedancia acústica a estos datos estándar de NPD. La impedancia acústica está relacionada con la propagación de las ondas acústicas en un medio, y se define como el producto de la densidad del aire y la velocidad del sonido. Para una intensidad acústica determinada (potencia por unidad de superficie) percibida a una distancia específica de la fuente, la presión acústica asociada (usada para definir las métricas SEL y LAmax) depende de la impedancia acústica del aire en la ubicación de la medición. Es una función de la temperatura y la presión atmosférica (e indirectamente de la altitud ). Por tanto, es necesario ajustar los datos NPD estándar de la base de datos de ANP para tener en cuenta las condiciones reales de temperatura y presión en el punto del receptor, que por lo general difieren de las condiciones normalizadas de los datos de ANP. El ajuste de impedancia que ha de aplicarse a los niveles estándar de NPD se expresa como sigue:
donde:
La impedancia ρ·c se calcula como sigue:
El ajuste de impedancia acústica suele ser inferior a algunas décimas de un dB. En particular, cabe destacar que, en condiciones atmosféricas estándar (p0 = 101,325 kPa y T0 = 15,0 oC), el ajuste de impedancia es inferior a 0,1 dB (0,074 dB). No obstante, cuando hay una variación importante de la temperatura y de la presión atmosférica en relación con las condiciones atmosféricas de referencia de los datos NPD, el ajuste puede resultar más importante. (*) Aunque la noción de una trayectoria de vuelo de longitud infinita es importante para definir el nivel de exposición al ruido del evento LE, guarda menor relevancia en el caso del nivel máximo del evento Lmax que se rige conforme al ruido emitido por la aeronave en una posición particular en el punto más próximo (o cerca) de aproximación al observador. A efectos de modelización, el parámetro de distancia NPD se considera como la distancia mínima entre el observador y el segmento.»." |
|
15) |
En la sección 2.7.18, «Parámetros de los segmentos de trayectorias de vuelos», el apartado «Potencia del segmento P» se sustituye por el texto siguiente: «Potencia del segmento P Los datos NPD tabulados describen el ruido de una aeronave en un vuelo recto uniforme sobre una trayectoria de vuelo infinita, es decir, con una potencia constante del motor P. La metodología recomendada divide las trayectorias reales de vuelo, a lo largo de las cuales la velocidad y la dirección varían, en una serie de segmentos finitos, cada uno de ellos considerados partes de una trayectoria de vuelo infinita uniforme para la que los datos NPD son válidos. No obstante, la metodología prevé cambios de potencia a lo largo de la longitud del segmento; se considera que cambia cuadráticamente con la distancia desde P1 al inicio hasta P2 al final. Por tanto, resulta necesario definir un valor de segmento uniforme equivalente P. Se considera que este es el valor en el punto del segmento más próximo al observador. Si el observador está junto al segmento (figura 2.7.k), se obtiene mediante la interpolación, como resultado de la ecuación 2.7.8 entre los valores finales, es decir
Si el observador está detrás o delante del segmento, se encuentra en el punto final más próximo, P1 o P2 ». |
|
16) |
La sección 2.7.19 se modifica como sigue:
|
|
17) |
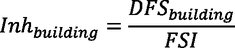
La sección 2.8 se sustituye por el texto siguiente: «2.8 Exposición al ruido Determinación de la zona expuesta al ruido La evaluación de la zona expuesta al ruido se basa en puntos de evaluación del ruido situados a 4 m ± 0,2 por encima del suelo, correspondientes a los puntos del receptor que se definen en las secciones 2.5, 2.6 y 2.7, calculados sobre una cuadrícula de fuentes individuales. Es preciso establecer un nivel de ruido para los puntos de la cuadrícula que se encuentran dentro de edificios, para lo cual se les deben asignar los puntos del receptor cercanos que menos ruido registran, salvo en el caso del ruido derivado del tráfico aéreo, en que el cálculo se efectúa sin tener en cuenta la presencia de edificios y se utilizan directamente los puntos del receptor de ruido ubicados dentro de un edificio. En función de la resolución de la cuadrícula, la zona correspondiente se asigna a cada uno de los puntos de cálculo que contiene. Por ejemplo, en una cuadrícula de 10 m x 10 m, cada punto de evaluación representa un área de 100 metros cuadrados que está expuesta al nivel de ruido calculado. Asignación de puntos de evaluación del ruido a edificios no residenciales La evaluación de la exposición al ruido de edificios no residenciales, como colegios y hospitales, se basa en unos puntos de evaluación del ruido situados a 4 ± 0,2 m sobre el suelo, correspondientes a los puntos del receptor definidos en las secciones 2.5, 2.6 y 2.7. A fin de evaluar los edificios no residenciales expuestos al ruido derivado del tráfico aéreo, se asocia cada edificio al punto del receptor que más ruido registra dentro del propio edificio o, en caso de no haberlo, en la cuadrícula que lo rodea. Para evaluar los edificios no residenciales expuestos a fuentes de ruido terrestres, los puntos del receptor se colocan aproximadamente a 0,1 m delante de sus fachadas. Las reflexiones de la fachada objeto de examen deben excluirse del cálculo. A continuación, se asocia el edificio al punto receptor de sus fachadas que más ruido registra. Determinación de las viviendas y los habitantes expuestos al ruido A efectos de evaluar la exposición de las viviendas y de sus habitantes al ruido, solo se deben tener en cuenta los edificios residenciales. Por tanto, no se debe asignar ninguna vivienda o habitante a edificios que no sean para uso residencial, como los usados exclusivamente como colegios, hospitales, edificios para oficinas o fábricas. La asignación de las viviendas y de sus habitantes a edificios residenciales debe basarse en los últimos datos oficiales (en función de los reglamentos correspondientes de los Estados miembros). El número de viviendas, y de personas que residen en ellas, en los edificios residenciales son parámetros intermedios importantes para estimar la exposición al ruido. Lamentablemente, no siempre se dispone de datos relativos a estos parámetros. A continuación, se especifica cómo pueden obtenerse estos parámetros a partir de datos que se encuentran disponibles con mayor frecuencia. Los símbolos utilizados en este sentido son: BA= superficie construida del edificio DFS= superficie útil DUFS= superficie útil de cada vivienda H= altura del edificio FSI= superficie útil por habitante Dw= número de viviendas Inh= número de habitantes en cada vivienda NF= número de plantas V= volumen de los edificios residenciales Para calcular el número de viviendas y de personas que residen en ellas, debe usarse el procedimiento del caso 1 o el del caso 2, que se presentan a continuación, en función de la disponibilidad de los datos. Caso 1: se dispone de datos sobre el número de viviendas y de habitantes 1A: se conoce el número de habitantes o se ha calculado en función del número de viviendas. En este caso, el número de habitantes de un edificio es la suma del número de habitantes de todas las viviendas del edificio:
1B: solo se conoce el número de viviendas o de habitantes para entidades más grandes que un edificio; por ejemplo, distritos censales, manzanas, barrios o incluso un municipio entero. En este caso, el número de viviendas y de habitantes de un edificio se calcula en función del volumen del edificio:
El índice “total” aquí hace referencia a la entidad correspondiente considerada. El volumen del edificio es el producto de su superficie de base y de su altura:
Si no se conoce la altura del edificio, debe calcularse en función del número de plantas NFbuilding , suponiendo una altura media por planta de 3 m:
Si tampoco se conoce el número de plantas, debe usarse un valor predeterminado para el número de plantas representativo del barrio o del municipio. El volumen total de los edificios residenciales de la entidad considerada Vtotal se calcula como la suma de los volúmenes de todos los edificios residenciales de la entidad: (2.8.5)
Caso 2: no se dispone de datos sobre el número de habitantes En este caso, el número de habitantes se calcula en función de la superficie útil media por habitante FSI. Si no se conoce este parámetro, debe usarse un valor predeterminado. 2A: la superficie útil se conoce en función del número de viviendas. En este caso, el número de habitantes de cada vivienda se calcula como sigue:
El número total de habitantes del edificio ahora puede calcularse como en el caso 1A. 2B: La superficie útil se conoce para todo el edificio, es decir, se conoce la suma de las superficies útiles de todas las viviendas del edificio. En este caso, el número de habitantes se calcula como sigue:
2C: Solo se conoce la superficie útil de entidades más grandes que un edificio; por ejemplo, distritos censales, manzanas, barrios o incluso un municipio entero. En este caso, el número de habitantes de un edificio se calcula en función del volumen del edificio, tal y como se ha descrito en el caso 1B, donde el número total de habitantes se calcula como sigue:
2D: se desconoce la superficie útil. En este caso, el número de habitantes de un edificio se calcula según se ha descrito en el caso 2B, donde la superficie útil se calcula como sigue: (2.8.9)
El factor 0,8 es el factor de conversión superficie total → superficie útil. Si se conoce otro factor representativo de la zona en cuestión, deberá utilizarse y documentarse con claridad. Si no se conoce el número de plantas del edificio, deberá calcularse en función de la altura del edificio, Hbuilding , cuyo resultado suele ser un número no entero de plantas:
Si no se conocen la altura del edificio ni el número de plantas, deberá usarse un valor predeterminado para el número de plantas. representativo del barrio o del municipio. Asignación de puntos de evaluación del ruido a las viviendas y sus habitantes La evaluación de la exposición al ruido de las viviendas y sus habitantes se basa en puntos de evaluación del ruido situados a 4 ± 0,2 m sobre el suelo, correspondientes a los puntos del receptor definidos en las secciones 2.5, 2.6 y 2.7. A fin de calcular el número de viviendas y habitantes expuestos al ruido de aeronaves, se asocian todos los habitantes y viviendas de un edificio al punto del receptor que más ruido registra dentro del propio edificio o, en caso de no haberlo, en la cuadrícula que lo rodea. Para calcular el número de viviendas y de habitantes expuestos a fuentes de ruido terrestres, los puntos del receptor se colocan aproximadamente a 0,1 m delante de las fachadas de los edificios residenciales. Las reflexiones de la fachada objeto de examen deben excluirse del cálculo. Para colocar los puntos del receptor debe seguirse el procedimiento del caso 1 o del caso 2, que se presentan a continuación: Caso 1: cada fachada se divide en intervalos regulares
Caso 2: las fachadas se dividen a una distancia predeterminada desde el inicio del polígono
Asignación de las viviendas y sus habitantes a puntos del receptor Cuando se dispone de información sobre la ubicación de las viviendas en las plantas de los edificios, dichas viviendas y sus habitantes se asignan al punto del receptor situado en la fachada más expuesta de la vivienda en cuestión. Por ejemplo, en el caso de las casas aisladas, las casas adosadas de dos en dos y las casas pareadas o los edificios de apartamentos cuando se conozca la división interna del edificio, o los edificios en que la superficie de las plantas indique que solo hay una vivienda por planta o los edificios en que la altura y la superficie de las plantas indiquen que solo hay una vivienda por edificio. Cuando no se disponga de información sobre la ubicación de las viviendas en las plantas de los edificios como se ha explicado anteriormente, deberá usarse uno de los dos métodos siguientes, según proceda en cada caso concreto, para calcular la exposición al ruido de las viviendas y de sus habitantes.
(*) La mediana es el valor que separa la mitad superior (50 %) de la mitad inferior (50 %) de un conjunto de datos." (**) La mitad inferior del conjunto de datos puede asimilarse a la presencia de fachadas relativamente silenciosas. En caso de que se sepa de antemano —por ejemplo, por la ubicación de los edificios en relación con las fuentes de ruido dominantes— qué puntos del receptor mostrarán los mayores/menores niveles de ruido, no es necesario calcular el ruido de la mitad inferior.»." |
|
18) |
El apéndice D se modifica como sigue:
|
|
19) |
El apéndice F se modifica como sigue:
|
|
20) |
El apéndice G se modifica como sigue:
|
|
21) |
El apéndice I se modifica como sigue:
|
(*) Para este fin, la longitud total de la trayectoria en tierra siempre debe exceder la del perfil del vuelo. Esto puede conseguirse, si resulta necesario, con la incorporación de segmentos rectos de una longitud adecuada al último segmento de la trayectoria en tierra.
(**) Incluso aunque el reglaje de la potencia del motor se mantenga constante a lo largo de un segmento, la fuerza propulsora y la aceleración pueden cambiar debido a la variación de la densidad del aire con la altura. No obstante, a efectos de la modelización del ruido, estos cambios suelen ser insignificantes.
(***) Esto se recomendó en la edición anterior de CEAC, Doc 29, pero aún se considera provisional a la espera de que se obtengan más datos experimentales corroborativos.
(****) Definida de esta forma sencilla, la longitud total de la trayectoria segmentada es ligeramente inferior a la de la trayectoria circular. No obstante, el error de contorno consecuente es insignificante si los incrementos angulares son inferiores a 30o.».
(*) Aunque la noción de una trayectoria de vuelo de longitud infinita es importante para definir el nivel de exposición al ruido del evento LE, guarda menor relevancia en el caso del nivel máximo del evento Lmax que se rige conforme al ruido emitido por la aeronave en una posición particular en el punto más próximo (o cerca) de aproximación al observador. A efectos de modelización, el parámetro de distancia NPD se considera como la distancia mínima entre el observador y el segmento.».
(*) Esto se conoce como la corrección de la duración porque prevé los efectos de la velocidad de la aeronave en la duración del evento acústico —con la sencilla suposición de que, si otros aspectos son iguales, la duración y, por tanto, la energía acústica del evento recibida es inversamente proporcional a la velocidad de la fuente—.».
(*) La mediana es el valor que separa la mitad superior (50 %) de la mitad inferior (50 %) de un conjunto de datos.
(**) La mitad inferior del conjunto de datos puede asimilarse a la presencia de fachadas relativamente silenciosas. En caso de que se sepa de antemano —por ejemplo, por la ubicación de los edificios en relación con las fuentes de ruido dominantes— qué puntos del receptor mostrarán los mayores/menores niveles de ruido, no es necesario calcular el ruido de la mitad inferior.».»
State Agency Official State Gazette
Avda. de Manoteras, 54 - 28050 Madrid


 tienen un radio de curvatura idéntico Γ definido mediante:
tienen un radio de curvatura idéntico Γ definido mediante:


 en la ecuación (2.5.17),
en la ecuación (2.5.17),  en la ecuación (2.5.18);
en la ecuación (2.5.18); en la ecuación (2.5.17),
en la ecuación (2.5.17),  en la ecuación (2.5.20);
en la ecuación (2.5.20);
 en la ecuación (2.5.17) y
en la ecuación (2.5.17) y  en la ecuación (2.5.17) y
en la ecuación (2.5.17) y 













 , donde β
, donde β

 ;
;  ;
;  ;
;